
 Je viens de terminer le montage de mon Pulse XT-40 de Hangar 9, en électrique, avec moteur brushless Scorpion HK4025-740 alimenté en 5s, hélice 12×6, module télémétrique Electric-Air Graupner.
Je viens de terminer le montage de mon Pulse XT-40 de Hangar 9, en électrique, avec moteur brushless Scorpion HK4025-740 alimenté en 5s, hélice 12×6, module télémétrique Electric-Air Graupner.


Qu’est-ce que le Pulse XT-40 ?
Sorti en 2008, le Pulse XT-40 est un avion radiocommandé de type “sport” à ailes basses. Sa large surface alaire et son profil d’aile assez épais lui confèrent des qualités de vol remarquables, notamment une faible vitesse de décrochage et un comportement très sain, sans vice, ce qui est idéal pour les pilotes en “transition”, à savoir ceux ayant déjà été largement “dégrossis” depuis leurs débuts et qui ont un pilotage sain et solide.
Pour les mêmes raisons, c’est le type d’avion idéal pour voler souvent, sans se stresser, ce qui en fait le deuxième avion de beaucoup de pilotes.
Dans la même catégorie et pour le même usage, sur les terrains français on croise plutôt le Calmato 40 Sports, moins cher, plus rustique mais pas aussi raffiné et gracieux à mon goût.
Ceci dit le crash d’un avion “générique” fait sans doute moins mal au coeur que celui d’un joli modèle…
Le montage du Hangar 9 Pulse XT-40 : quels points d’attention spécifiques ?
Revenons-en au Pulse. Au final il y a pas mal de boulot pour un ARF, les gouvernes étant à installer avec des charnières fibres à coller… Ce n’est pas aussi rapide à monter qu’un Calmato, mais c’est plus joli et original sur les terrains, je ne vous l’avais pas dit ?

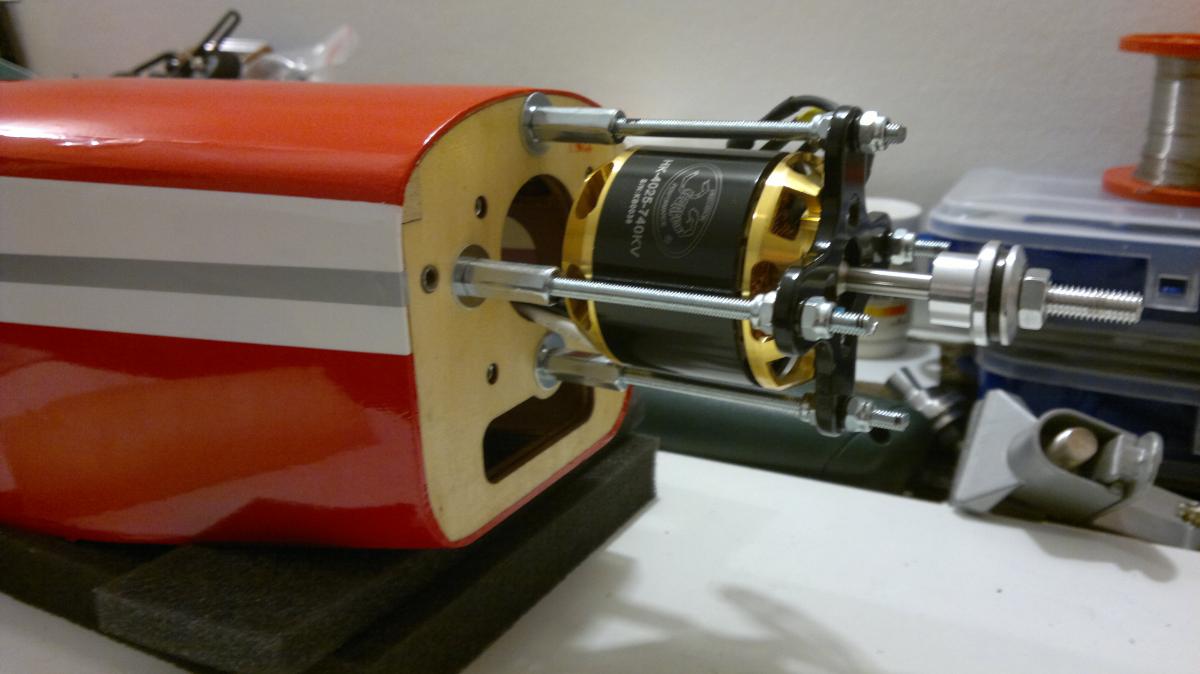 Il a fallu créer une fixation pour le moteur Scorpion qui se monte exclusivement par l’avant, d’où les tiges filetées 4mm, sachant que les inserts d’origine sont au pas US, il a fallu les remplacer.
Il a fallu créer une fixation pour le moteur Scorpion qui se monte exclusivement par l’avant, d’où les tiges filetées 4mm, sachant que les inserts d’origine sont au pas US, il a fallu les remplacer.
(J’aurais peut être du prendre un moteur avec montage arrière, je me serais donné moins de mal ! )
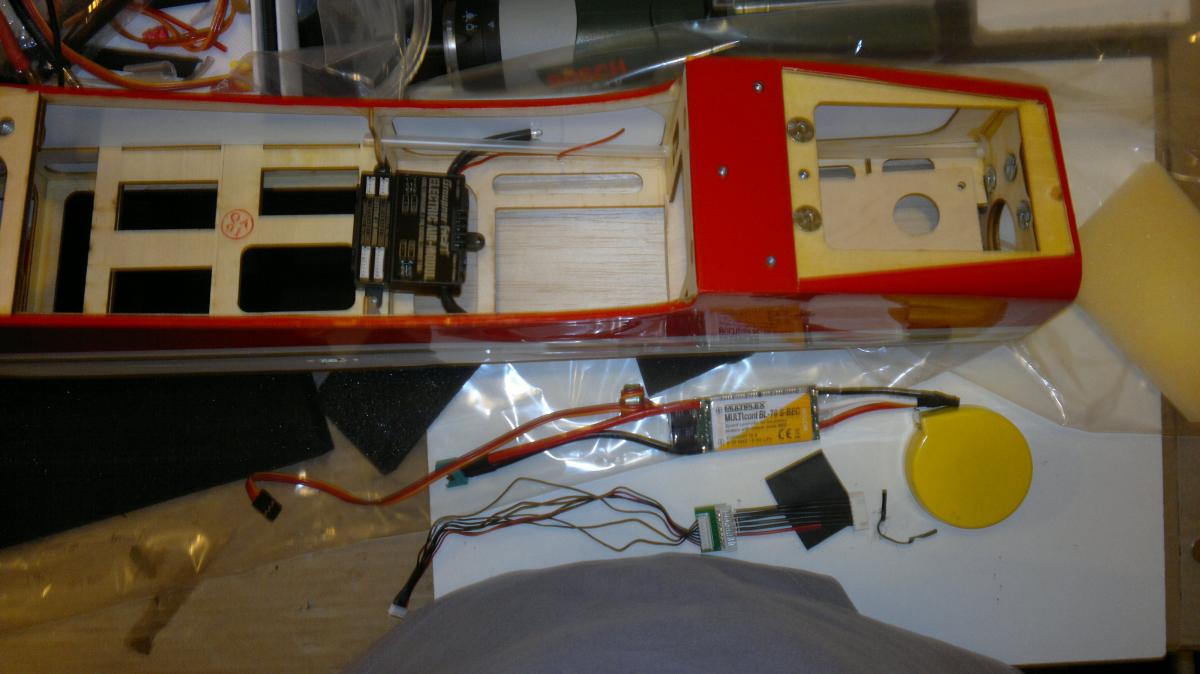
Côté câblage électrique
 Pas mal de boulot aussi côté électrique, beaucoup de câblage et de soudures, avec le module Electric Air de Graupner qui mesure lipo en tension et courant (+ les alertes réglables, le vario intégré…).
Pas mal de boulot aussi côté électrique, beaucoup de câblage et de soudures, avec le module Electric Air de Graupner qui mesure lipo en tension et courant (+ les alertes réglables, le vario intégré…).
 J’ai monté les fiches 4mm anti étincelles de Jeti, c’est impeccable, plus de risque d’usure prématurée des connecteurs.
J’ai monté les fiches 4mm anti étincelles de Jeti, c’est impeccable, plus de risque d’usure prématurée des connecteurs.
Roulette de queue
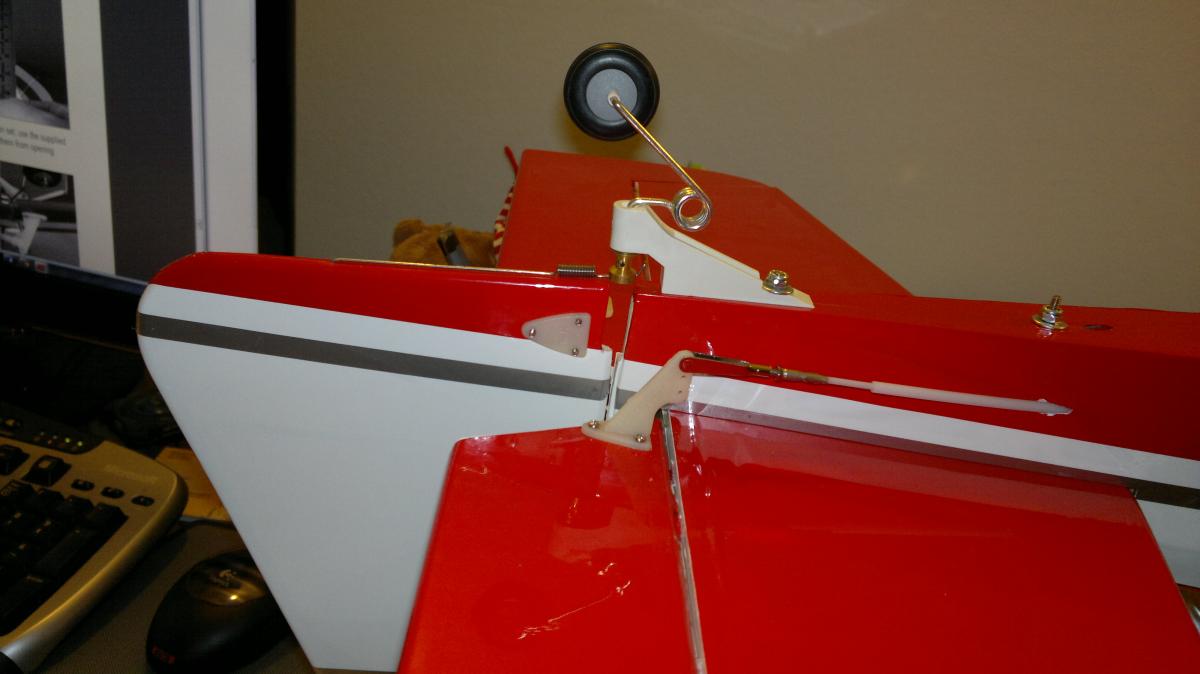 La roulette de queue d’origine non amortie à été remplacée par une Sullivan.
La roulette de queue d’origine non amortie à été remplacée par une Sullivan.
Quelles spécifications ?
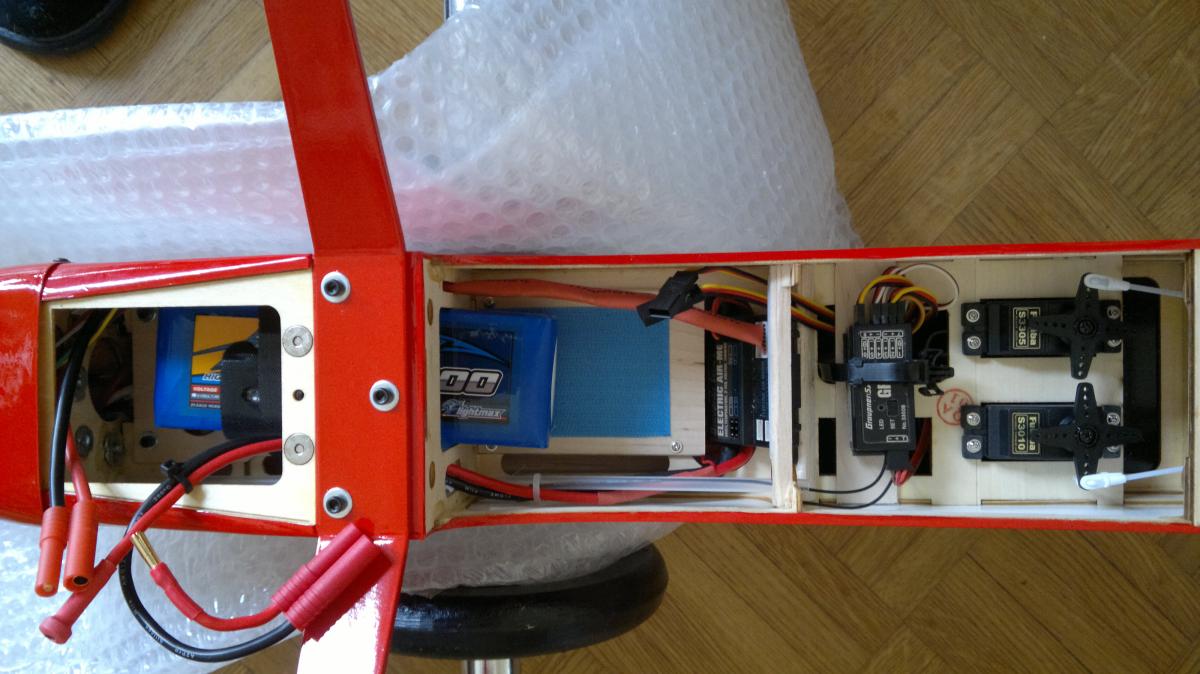
Une plaquette en ctp 15/10 prolonge celle qui sert à recevoir l’accu, vu que mon moteur est plus lourd que celui préconisé, je devrais sans doute reculer l’accu pour avoir le bon centre de gravité.
L’accu est un 5s 4000mAh, l’ESC un Multiplex 70A, fixé sous la trappe de l’accu. Le récepteur est fixé par un gros collier, sur mousse + plaquette ctp ajoutée devant les servos.
Côté servos, du Futaba 3010 aux ailerons et à la profondeur, et un 3305 (pignon métal) à la dérive, ainsi que des tringleries par gaine de transmission avec chapes métalliques à la place des chapes plastiques.
Pour les raccords de tringlerie côté servos, la tige de 2mm est coudée à 90°, insérée dans le palonnier, puis un clip de sécurité la verrouiille en place.
Un morceau de balsa sert de support d’antenne en largeur, la gaine de commande du servo de gaz servant de support d’antenne axial, les 2 antennes étant donc à 90°, comme il se doit.
Reste à fabriquer une balance de centrage, un support atelier/terrain ainsi que des housses pour les ailes et autres protections pour le transport !
Pour le premier vol, je le ferais sans doute en double commande avec un moustachu de mon club !
Modifications de l’ESC :
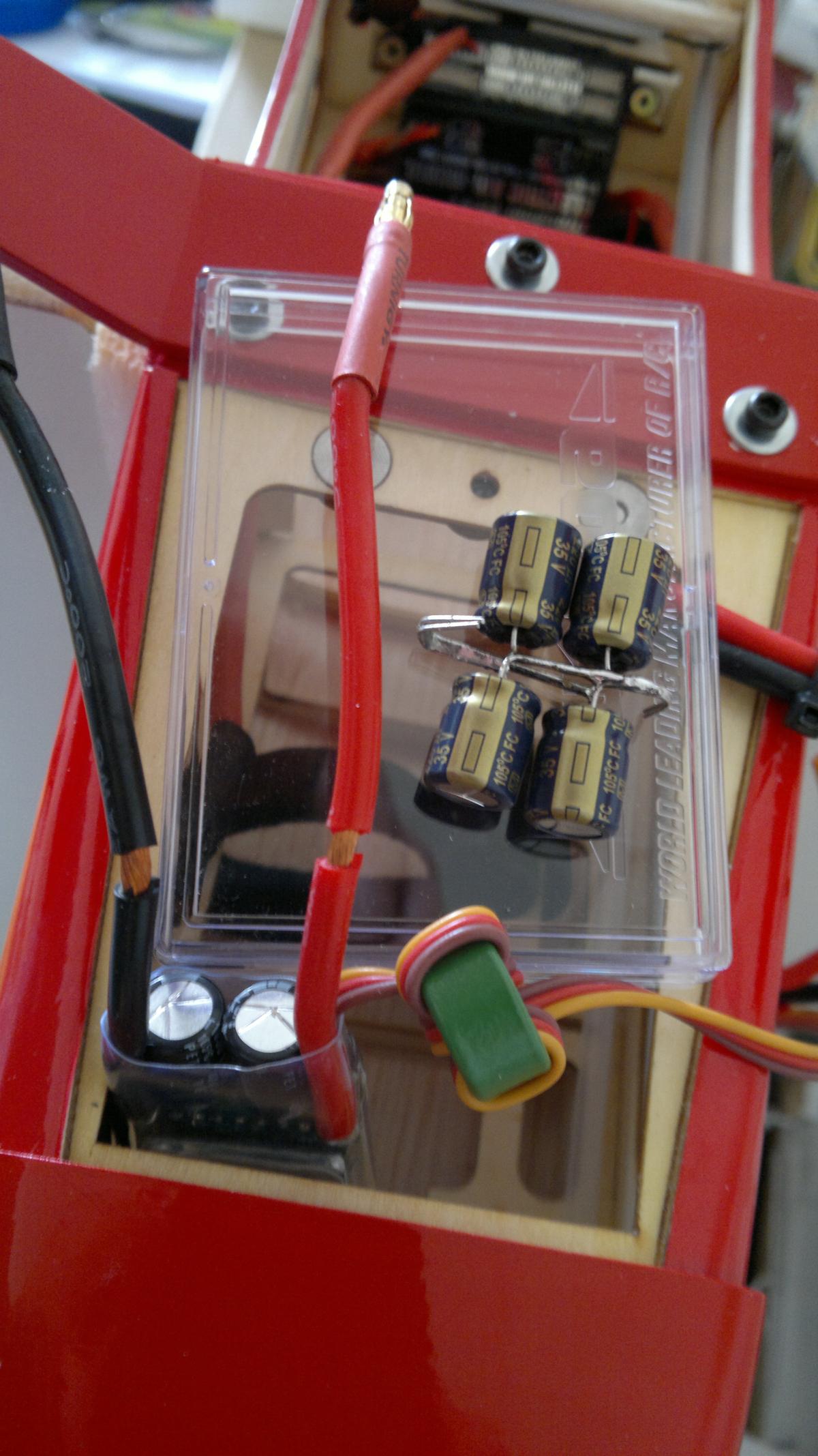 Ayant près de 40 cm de rallonges et module entre la batterie et l’ESC et ayant lu pas mal de choses à ce sujet, j’ai ajouté 4 condensateurs de 270µF (35V- basse impédance) en parallèle, au plus près de l’ESC et des condensateurs déjà en place à l’origine.
Ayant près de 40 cm de rallonges et module entre la batterie et l’ESC et ayant lu pas mal de choses à ce sujet, j’ai ajouté 4 condensateurs de 270µF (35V- basse impédance) en parallèle, au plus près de l’ESC et des condensateurs déjà en place à l’origine.
A savoir que lorsqu’on rallonge les câbles de l’ESC côté batterie, il y a un risque que l’ESC subisse des pics de tension et soit endommagé. Il vaut mieux rallonger les 3 câbles côté moteur quand c’est possible.
 Ici, à cause du module de télémétrie, il fallait au total 40cm de plus côté batterie.
Ici, à cause du module de télémétrie, il fallait au total 40cm de plus côté batterie.
(Dernière discussion en date à propos des rallonges de câbles batterie vers ESC : Rallonger des fils de puissances)
Un peu de colle chaude pour isoler les pattes des condensateurs, et un morceau de gaine thermo par dessus pour isoler tout çà !
Tests au sol et premier vol du Pulse XT-40 samedi normalement !
Premier vol du Pulse XT-40
Effectué en double commande (merci Alain Z de l’AMC94) :
L’avion très sain, bien centré, il vole sur des rails, son inertie est un peu déroutante quand on vient des avions en “mousse”, mais je m’y attendais.
J’ai laissé Alain piloter pour le décollage et l’attero, j’ai pris la main pour quelques tours de piste.
Problème : le moteur vibre au delà de mi-gaz, la fixation par l’avant avec les tiges filetées n’est pas assez rigide.
Solution envisagée : toujours avec un montage du moteur par l’avant, mais avec un support spécial. Par contre entre 100 et 150g de plus à l’avant… Moyen pour la facilité de centrage.
Solution retenue : montage par l’arrière (comme avec le moteur eFlite recommandé par Hangar 9).
Par contre mon moteur Scorpion HK4025-740 est prévu pour les Hélicos, et se monte exclusivement par l’avant.
J’ai donc démonté l’axe, lui ai creusé une nouvelle gorge pour le circlip et l’ai remonté dans l’autre sens. J’ai également du raccourcir l’axe côté hélice pour passer de 28mm à 14mm, merci la Dremel !
J’en ai profité pour revérifier l’équilibrage de l’hélice ainsi que du cône, en faisant au mieux.
Avant :
Après :

Deuxième vol : en solo !
C’était mon premier vol sur un avion aile basse de plus de 2kg (2.7kg exactement). Un peu de stress, normal !
Test au sol : le moteur ne vibre plus, ouf !
Décollage : l’avion tire à gauche au roulage, il faudra réaligner la roulette avec la dérive !
Vol : Ça va vite ! Doucement sur le manche des gaz !

Quelques tours de piste tranquillement et puis quelques approches et un atterrissage réussi à la 2ème tentative, ouf !
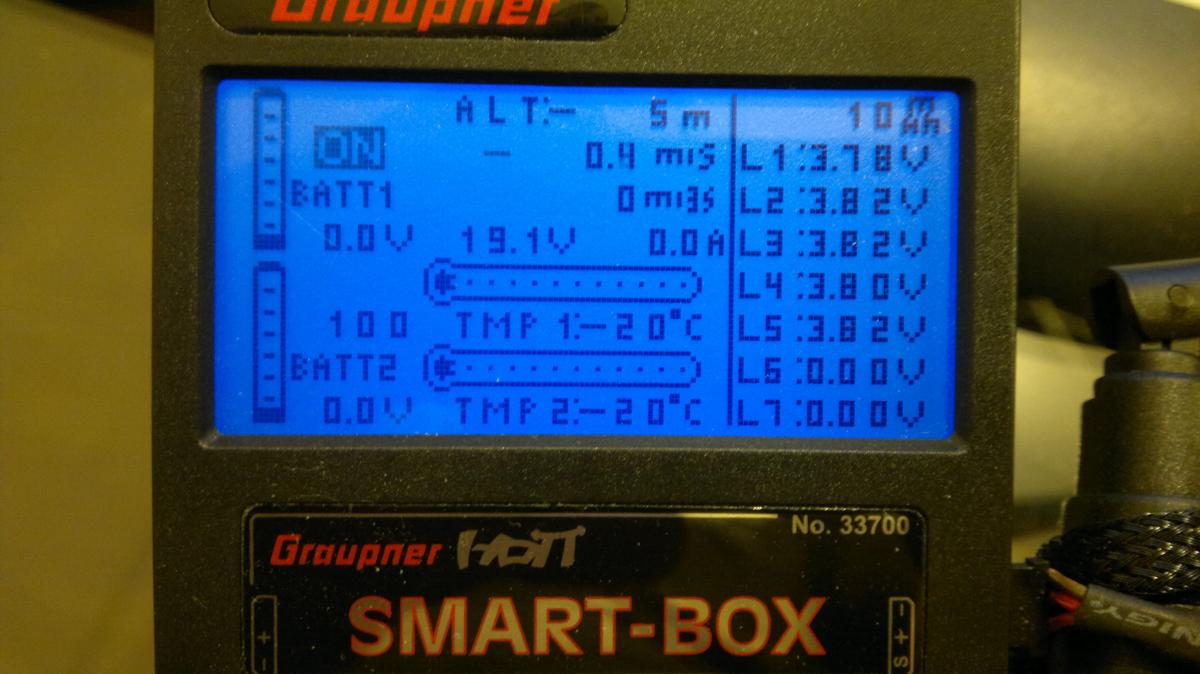
Test de puissance au sol, à 3/4 des gaz, 18V 52A, je vous laisse faire la multiplication pour la puissance…





